SMART TRASH BIN BERBASIS MIKROKONTROLER DENGAN DETEKSI OTOMATIS DAN MONITORING KONDISI SAMPAH
Ringkasan
Project yang kami kembangkan ini merupaka projecr perancangan dan pembuatan tempat sampah pintar (Smart Trash Bin) berbasis mikrokontroler yang mampu bekerja secara otomatis dan higenis.Sistem ini memanfaatan 3 sensor, yaitu sensor ultrasonik untuk mendeteksi tangan pengguna, sensor gas untuk mendeteksi bau atau gas berlebih, serta sensor load cell untuk mengukur berat sampah di dalam tempat sampah.
Ketika sensor mendeteksi adanya tangan, tutup tempat sampah akan terbuka secara otomatis menggunakan servo motor dan akan menutup kembali setelah beberapa detik. Sensor load cell berfungsi untuk mengetahui apakah sampah sudah mencapai batas berat tertentu,serta sensor gas untuk mendeteksi bau atau gas berlebih di dalam tempat sampah. Jika sampah sudah penuh atau beratnya melebihi batas, sistem akan memberikan peringatan melalui LED atau buzzer. Selain itu, jika terdeteksi gas atau bau yang tinggi, buzzer juga akan aktif sebagai tanda peringatan. Dengan adanya sistem ini, diharapkan pengelolaan sampah menjadi lebih efisien, higienis, dan informatif.
Latar Belakang
Dalam era modern saat ini, pengelolaan sampah yang efisien menjadi salah satu tantangan utama dalam menjaga kebersihan lingkungan.Permasalahan terkait pengelolaan sampah yang tidak optimal dapat menyebabkan berbagai dampak negatif, seperti pencemaran lingkungan, bau tidak sedap, dan penyebaran penyakit. Oleh karena itu, diperlukan inovasi teknologi yang mampu meningkatkan efektivitas dan kebersihan dalam pengelolaan sampah.
Seiring perkembangan teknologi mikrokontroler,telah muncul berbagai inovasi dalam pengembangan tempat sampah pintar (Smart Trash Bin). Tempat sampah pintar merupakan solusi cerdas yang mampu bekerja secara otomatis dan higienis, mengurangi kontak langsung dengan sampah, serta memberi peringatan dini terkait kondisi tempat sampah. Sistem ini memanfaatkan sensor ultrasonik untuk mendeteksi keberadaan tangan pengguna dan tingkat kepenuhan sampah, serta sensor gas untuk mendeteksi bau atau gas berlebih di dalam tempat sampah. Ketika tangan terdeteksi di dekat tempat sampah, tutup akan secara otomatis terbuka menggunakan servo motor, kemudian menutup kembali setelah tangan terdeteksi menjauh dari tempat sampah. Selain itu, sistem juga dilengkapi indikator berupa LED atau buzzer sebagai peringatan jika sampah sudah penuh atau bau yang berlebihan terdeteksi.
Dengan adanya inovasi ini, diharapkan pengelolaan sampah dapat dilakukan secara lebih higienis, nyaman, dan efisien. Tempat sampah pintar ini tidak hanya membantu dalam menjaga kebersihan lingkungan, tetapi juga meningkatkan kesadaran masyarakat dalam pengelolaan sampah yang lebih bertanggung jawab .
Tujuan
1. Membuat tempat sampah pintar yang bisa bekerja secara otomatis.
2. Menggunakan sensor untuk mendeteksi tangan agar tutup bisa terbuka sendiri.
3. Mengetahui apakah sampah sudah penuh atau belum.
4. Mendeteksi bau atau gas yang berlebih di dalam tempat sampah.
5. Membuat sistem yang lebih higienis karena tidak perlu menyentuh tempat sampah.
Manfaat
Project ini dibuat untuk memudahkan pengguna saat membuang sampah karena tutup terbuka otomatis. Saat tempat sampah penuh dan bau,buzzer dan led akan menyala untuk membantu pengguna.
Alat dan Bahan
Alat dan bahan
1. Laptop
2. Arduino IDE (Program)
3. ESP32
4. Sensor ultrasonic (HC-SR04)
5. Sensor gas (MQ-2)
6. Sensor load cell
7. Servo motor (SG90 atau MG996R)
8. Buzzer
9. LED (merah dan hijau)
10. Breadboard / pcb
11. Resistor (220 ohm / 330 ohm)
12. Kabel jumper
13. Baterai (power supply)
14. Tempat sampah
15. Rangka atau casing
16. Bucket (dudukan servo)
Metodologi
Penelitian ini menggunakan metode Prototyping, yang memungkinkan pengembangan sistem dilakukan secara iteratif untuk memastikan perangkat keras dan perangkat lunak berfungsi secara optimal melalui tahap evaluasi yang berkelanjutan.
1. Identifikasi dan Analisis Kebutuhan
- Tahap awal penelitian dibuat untuk spesifikasi teknis dan fungsional alat.
- Analisis masalah,menetapkan parameter operasional,Seperti pengaturan jarak deteksi sensor ultrasonik agar tutup tempat sampah bisa terbuka otomatis saat terdeteksi tangan mendekat, serta penyesuaian pembacaan sensor supaya hasil pengukuran volume sampah lebih akurat.
2. Pembangunan Prototipe
- Realisasi rancangan ke dalam bentuk fisik dan program fungsional.
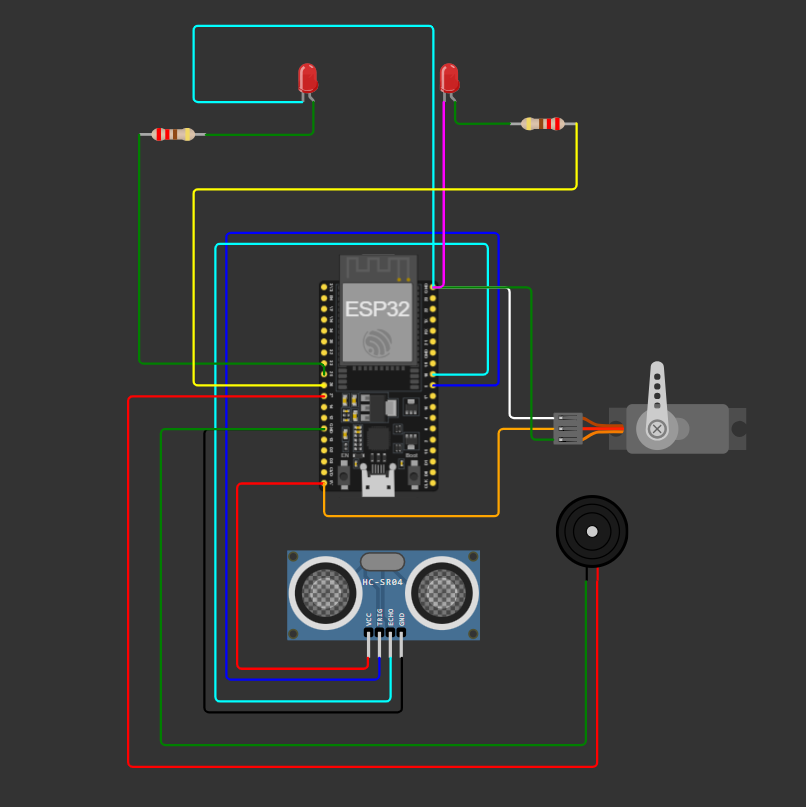
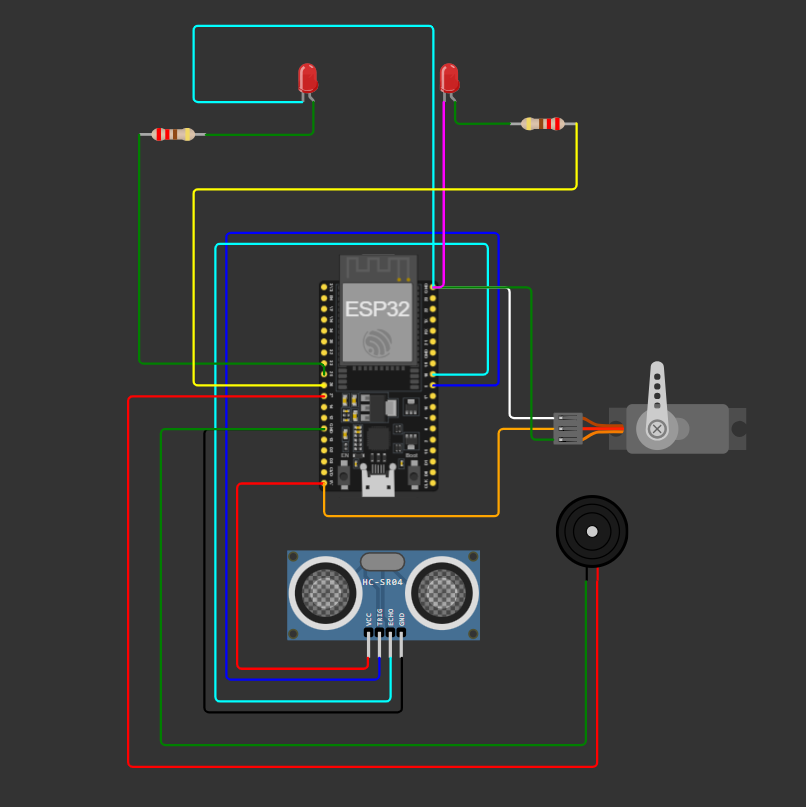
- Integrasi perangkat keras,perakitan komponen elektronik sesuai skema rangkaian .
- Implementasi kode program, penulisan algoritma menggunakan bahasa C/C++ pada Arduino IDE.
Desain Sistem
Skenario Pengujian
1.Pengujian sensor ultrasonik ( deteksi tangan dan jarak )
Tangan di dekatkan ke sensor dengan jarak 1 cm - 10 cm untuk mengetahui respon sensor dalam membuka otomatis tutup terbuka saat jarak di 1 cm-15 cm
2.Pengujian servo motor (Buka-Tutup)
sensor mendeteksi objek lalu servo bergerak membuka - delay -menutup untuk mengecek mekanisme buka-tutup berjalan stabil (gerakan halus tanpa macet)
3.Pengujian sensor load cell (Berat sampah)
sensor menentukan batas penuh (beban) misalnya 3 kg buzzer / led akan aktif saat melewati batas.
4.Pengujian sensor gas (MQ-2)
menguji sensitivitas sensor dimana mendekatkan sumber gas/bau (misalnya asap atau alkohol). maka buzzer aktif saat gas terdeteksi tinggi
Hasil Pengujian
Berdasarkan pengujian yang telah kami lakukan, sistem Smart Trash Bin secara umum sudah dapat bekerja sesuai dengan yang diharapkan, meskipun masih terdapat beberapa kendala pada kondisi tertentu. Pada pengujian sensor ultrasonik, alat mampu mendeteksi keberadaan tangan dengan baik dan secara otomatis mengaktifkan servo untuk membuka tutup tempat sampah. Respon yang dihasilkan tergolong cukup cepat, namun pada beberapa kondisi tertentu masih terjadi sedikit keterlambatan, terutama ketika sistem sedang memproses data dari sensor lain secara bersamaan.
Pengujian pada sensor load cell menunjukkan bahwa sistem dapat membaca berat sampah dan menentukan kondisi penuh atau tidak. Akan tetapi, hasil pembacaan terkadang kurang stabil, terutama ketika posisi sampah tidak merata atau terjadi perubahan beban secara tiba-tiba. Hal ini menunjukkan bahwa sensor masih dipengaruhi oleh kondisi fisik di dalam tempat sampah.
Pada sensor gas MQ-2, sistem mampu mendeteksi adanya peningkatan gas atau bau tertentu dan memberikan respon berupa aktifnya buzzer sebagai peringatan. Namun, sensitivitas sensor masih dipengaruhi oleh kondisi lingkungan sekitar seperti sirkulasi udara dan suhu, sehingga pembacaan tidak selalu konsisten.
Pengujian pada servo motor menunjukkan bahwa mekanisme buka-tutup dapat berjalan dengan baik, meskipun pada beberapa percobaan ditemukan gerakan yang kurang stabil akibat tegangan yang tidak konsisten. Setelah dilakukan penyesuaian pada sumber daya, kinerja servo menjadi lebih baik dan stabil.
Secara keseluruhan, sistem dapat menjalankan fungsi utama yaitu membuka tutup secara otomatis, mendeteksi kondisi sampah, serta memberikan peringatan kepada pengguna. Meskipun demikian, masih diperlukan beberapa perbaikan terutama pada stabilitas sensor, respons sistem, dan manajemen daya agar performa alat dapat lebih optimal dan konsisten dalam berbagai kondisi.
Kesimpulan
Dari project yang dibuat, tempat sampah pintar ini sudah bisa bekerja dengan baik secara otomatis dan lebih higienis. Tutup tempat sampah bisa terbuka sendiri saat ada tangan, jadi tidak perlu disentuh langsung. Sistem juga bisa mendeteksi apakah sampah sudah penuh dan apakah ada bau yang berlebih.
Jika sampah sudah penuh atau bau terlalu kuat, alat akan memberi peringatan lewat LED dan buzzer. Dengan adanya alat ini, membuang sampah jadi lebih mudah, bersih, dan membantu pengguna mengetahui kondisi tempat sampah.
Source Code / Pseudocode
{
"version": 1,
"author": "Uri Shaked",
"editor": "wokwi",
"parts": [
{ "type": "board-esp32-devkit-c-v4", "id": "esp", "top": 0, "left": -91.16, "attrs": {} },
{ "type": "wokwi-hc-sr04", "id": "ultrasonic1", "top": 260.7, "left": -119.3, "attrs": {} },
{ "type": "wokwi-servo", "id": "servo1", "top": 94, "left": 115.2, "attrs": {} },
{ "type": "wokwi-led", "id": "led1", "top": -176.4, "left": 3.8, "attrs": { "color": "red" } },
{
"type": "wokwi-led",
"id": "led2",
"top": -176.4,
"left": -121,
"attrs": { "color": "red" }
},
{ "type": "wokwi-buzzer", "id": "bz1", "top": 204, "left": 117, "attrs": { "volume": "0.1" } },
{
"type": "wokwi-resistor",
"id": "r1",
"top": -111.25,
"left": -249.6,
"attrs": { "value": "220" }
},
{
"type": "wokwi-resistor",
"id": "r2",
"top": -120.85,
"left": 76.8,
"rotate": 180,
"attrs": { "value": "220" }
}
],
"connections": [
[ "esp:TX", "$serialMonitor:RX", "", [] ],
[ "esp:RX", "$serialMonitor:TX", "", [] ],
[ "ultrasonic1:VCC", "esp:5V", "red", [ "v9.6", "h-115.2", "v-153.6" ] ],
[ "ultrasonic1:GND", "esp:GND.1", "black", [ "v48", "h-174", "v-240" ] ],
[ "esp:5", "ultrasonic1:TRIG", "blue", [ "h57.6", "v-134.4", "h-240", "v393.6", "h134.4" ] ],
[ "esp:18", "ultrasonic1:ECHO", "cyan", [ "h48", "v-115.2", "h-240", "v403.2", "h9.6" ] ],
[ "servo1:V+", "esp:5V", "orange", [ "h-48", "v76.9", "h-19.2" ] ],
[ "servo1:GND", "esp:GND.2", "white", [ "h-38.4", "v-115.2" ] ],
[ "servo1:PWM", "esp:GND.2", "green", [ "h-19.2", "v-134.2" ] ],
[ "bz1:2", "esp:27", "red", [ "v163.2", "h-413.2", "v-355.2" ] ],
[ "bz1:1", "esp:GND.1", "green", [ "v144", "h-374.4", "v-19.2" ] ],
[ "esp:25", "r1:1", "green", [ "v-9.6", "h-163.05" ] ],
[ "led2:A", "r1:2", "green", [ "v28.8" ] ],
[ "led2:C", "esp:GND.2", "cyan", [ "v0", "h-95.6", "v-67.2", "h144" ] ],
[ "led1:C", "esp:GND.2", "magenta", [ "v0" ] ],
[ "r2:2", "led1:A", "green", [ "v0.3", "h-48.2" ] ],
[ "r2:1", "esp:26", "yellow", [ "v57.9", "h-337.4", "v163.2" ] ]
],
"dependencies": {}
}